La motorisation
La sélection de la motorisation et de l’hélice associée s’est faite avec
ecalc.ch
Objectif : Puissance entre 1000 et 1200W. (en puissance crête de courte durée) et traction entre 4.5kg et 5kg.
Pour cette gamme de puissance, on trouve des moteurs de 250g à 300g avec des Kv de 400 à 800.
Mon choix s’est porté sur la gamme DualSky EA qui offre un large choix et une bonne qualité.
Les moteurs XM4255EA sont disponibles en différentes versions (KV) et peuvent atteindre des puissances crêtes (15s) entre 1100W et 1200W
La sélection s’est faite en essayant (avec ecalc.ch) différentes configurations moteurs / hélices pour se placer au dessus des 1000W en respectant le courant maxi supportés par les moteurs.
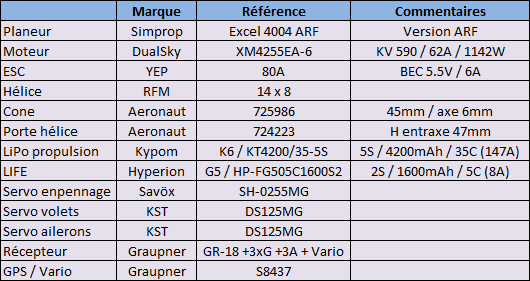
Le moteur choisi est le Duasky XM4255EA-6 (KV 590) alimenté en LiPo 5S pour entrainer une hélice 14×8 RFM.
Ce moteur supporte 62A / 1142W. (15 secondes). Masse : 253g.

Hélice RFM et cone Aeronaut.

Configuration Ecalc
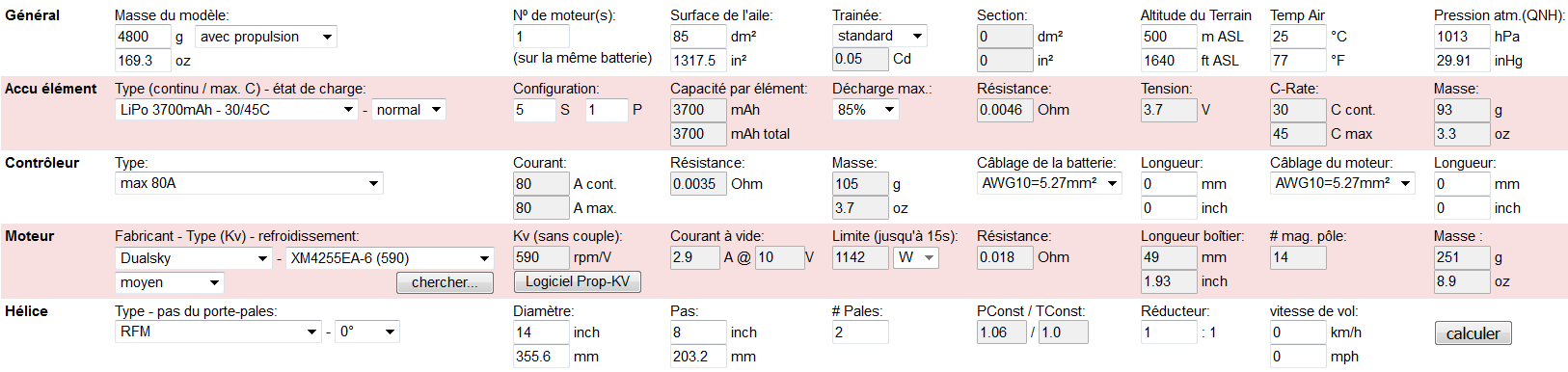
Résultats
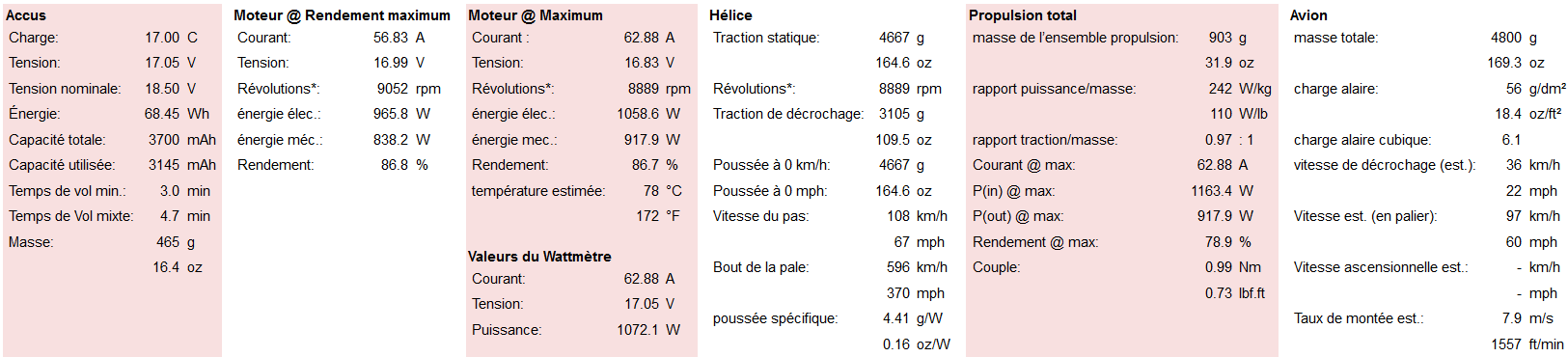
Puissance maxi. : 1058W
Courant max. : 62.8A
Régime maxi. : 8889tr/min
Traction statique : 4.67 kg
Mesures :
L’hélice RFM 14″ montée sur le H Aeronaut 47mm mesure en réalité 371mm de diamètre, soit 14.6″ au lieu des 14″.
Batterie 5S/4200mAh chargée à 4.15V par éléments (20.75V)
Le wattmètre est en série avec des adaptateurs de connectiques, le tout augmente la résistance et chute donc un peu la puissance.
Courant mesuré : 54A
Tension (au wattmètre) : 18.05V
Puissance : 979W
C’est cohérent avec les calculs. Batterie complètement chargée, sans wattmètre, la puissance devrait être un peu supérieure à 1000W.
Controleur moteur brushless
La commande du moteur est réalisée par un controleur YEP 80A.
J’utilise souvent des ESC Turnigy Plush dont je suis satisfaits.
Mais j’ai lu des retours très bons sur les ESC YEP.
Certains modèles embarquent un BEC très puissants (Cf YEP 90 avec un BEC 12A).
Caractéristiques principales ESC YEP 80A :
Alimention : 2S à 6S
BEC à découpage : 5.5V / 6A
Courant maxi. continu : 80 A
Courant maxi. 10s : 100 A
Masse avec fils : 70g

Les servos
Aux volets et ailerons : 4 x KST DS125MG.
A l’empennage : 2 x Savöx SH-0255MG.


Caractéristiques principales :
KST DS125MG
Dimensions : 30 x 10 x 35mm
Masse : 28g
Couple : 7.0kg.cm à 6.0V et 6.0kg.cm à 4.8V
Vitesse: 0.12s/60° à 6.0V et 0.15s/60° à 4.8V
Pignons métalliques et 2 roulements à billes
Test des KST DS125MG par F. Cahours.
ATTENTION : Je me suis aperçu après achat que les logements des servos dans les ailes sont assez petits
et qu’il va falloir bricoler pour faire rentrer les KST DS125MG.
Savöx SH-0255MG
Dimensions : 22.8 x 12 x 29.4mm
Masse : 16g
Couple : 3.9kg.cm à 6.0V et 3.1kg.cm à 4.8V
Vitesse: 0.13s/60° à 6.0V et 0.16s/60° à 4.8V
Pignons métalliques et 1 roulement à billes
Récepteur et capteurs
Le récepteur est un Graupner GR-18 +3XG +3A +Vario.
Il intègre 3 gyromètres, 3 accéléromètres et 1 variomètre barométrique.
Je l’ai choisi afin de tester la possibilité de sécuriser la phase de lancer ou de décollage au chariot par gyrostabilisation.

Sur le sujet, lire l’article de P. Alban sur Jivaro Model.
Pourquoi et comment utiliser un gyro en planeur ?
Alimentation électrique
L’alimentation électrique est assurée par 2 batteries.
1 LiPo 5S 4200mAh pour la propulsion et la redondance d’alimention récepteur / servos
et 1 LIFEPO4 2S 1600mAh pour les récepteur / servos.

Le pack LiPo pèse 490g et le LIFE 88g.
La redondance d’alimentation est réalisée par 2 diodes schottcky insérées sur chacune des liaisons positives. (Cathode commune)
Sur la photo, on aperçoit la diode sur la rallonge pour l’accu LIFE.
Les 2 diodes sont différentes car d’une part la tension du BEC de l’ESC n’est que de 5.5V, et d’autre part,
il faut ramener la tension du LIFE à 6V car les servos ne supportent pas plus.
Diode sur l’ESC : SBT1545LSS Schottky 15A (275A en pic), très faible chute de tension
Diode sur l’accu LIFE : SB5100L Schottky 5A (250A en pic)
Configuration Excel 4004